Posture, locomotion and voluntary movement
Publisher Summary
This chapter discusses the concepts of posture, locomotion, and voluntary movement. Many of the ideas about human posture and locomotion are based upon observations on quadrupeds, although some information comes from experiments on other primates and more has been gained from a few experiments on human subjects. The human, except as an infant, is a biped and differs from the quadrupeds in posture and in the manner of locomotion. Tonic or static posture in man is the maintenance of an upright vertical posture above the two supporting limbs. Locomotion is the movement of the body, by a coordinated series of muscle activities, in a particular direction while the relation of the body as a whole to the ground is maintained. The process of locomotion in man, as exemplified in walking, consists in raising one leg by flexion and producing extensor thrust in the other so that the body falls forward. Control of muscle movements can be exerted at all levels from the cortex to the spinal cord at the segment of origin of the muscle. The cortex is responsible for the initiation of voluntary movement. The conscious initiation of movement is a process originating in the formulation of the will to move in the frontal cortex. Except in the case of relatively simple movements such as rapid movements involving very few muscles, impulses pass from the frontal cortex to the basal ganglia. The principal muscle involved in a movement is the agonist, muscles assisting its action are synergist, and those giving the opposite movement are antagonist.
A number of terms should be explained before discussing these concepts. Muscles of the skeletal system are usually described according to their function as flexor or extensor. A flexor muscle contracts to produce bending at a joint – the biceps muscle, for example, bending the arm at the elbow joint – whilst an extensor muscle has the opposite action of straightening the line of bones at a joint -as the triceps muscle straightens the arm. Slightly different terms are used in the case of the muscles of mastication which may be elevator or depressor to the mandible, or may move it forward (protrusor) or back (retrusor). All these movements involve changes in the plane of one muscle in relation to another; rotational or twisting movements also occur, as in the cervical spine when the head is turned. Indeed, because of the position of insertion of muscles into the bones, rotational movements may be included in the flexor or extensor movement. The principal muscle involved in a movement is the agonist (or prime mover, or sometimes, protagonist); muscles assisting its action are synergist, and those giving the opposite movement are antagonist.
(i) The stretch reflex. Stretching of a muscle stimulates the spindle stretch receptors and causes contraction of the muscle by a simple reflex usually involving only two neurones directly.
(ii) The tendon jerk. This is the same as the stretch reflex, but is initiated by tapping the muscle tendon to produce the stretching of the muscle.
(iii) The flexor response. In response to a noxious stimulus, the limb is flexed to remove it from the point of stimulation. Although the reflex is seen with noxious stimuli, it is argued that, in locomotion, the touch and pressure stimuli to a supporting limb may initiate flexion.
(iv) The crossed extensor reflex. This response may be associated with the flexor response, particularly if the stimuli are intense. Flexion of the stimulated limb is accompanied by extension of the limb on the other side, the contralateral limb.
(v) The scratch reflex. Repetitive stimulation of touch receptors causes a pattern of limb movement involving alternate extension and flexion. Since locomotion is a pattern of alternate extension and flexion of the limbs, analogies have been sought between the scratch reflex and locomotion.
Posture
Posture may be considered to involve three processes. The first may be termed tonic, or static, posture; the second is the correction of small changes in body position, and is given the name of ‘righting’, or righting reflexes; and the third is the maintenance of a general postural position during movement – statokinetic reflexes. Another term sometimes used is ‘attitude’: the spatial relationship of the body structures to each other (Fig. 14.1). This is a part of all three aspects of posture but is probably most important in the statokinetic responses.
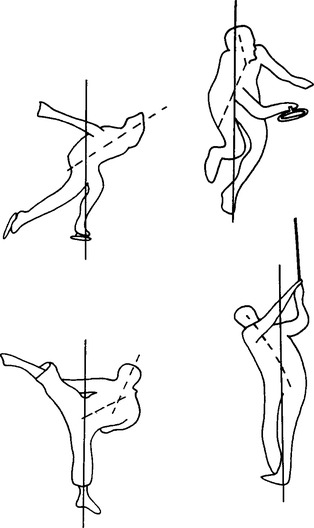
Figure 14.1 Attitude – the balancing of body structures during movement. The vertical line through each figure passes through the centre of gravity. The dashed line gives the adjusted position of the line originally vertical in the standing upright position. The centre of gravity is at the intersection of the solid and the dashed line. Note how the body weight is distributed in different positions.
Static posture (stance)
Tonic or static posture in man is the maintenance of an upright vertical posture above the two supporting limbs. It may be achieved by the fixation of joints by simultaneous contraction of the extensor and flexor muscles. This is true in the lower limbs, as it is in all four limbs of a quadruped: but in addition the vertebral column must be fixed both intrinsically and extrinsically so that pelvis, abdomen and thorax are positioned above the pelvic basin. This combination of activities is referred to as the positive supporting action, and it seems to be initiated by proprioceptive impulses from the small interosseous muscles of the feet. It is replaced by the negative supporting action when flexion of a limb causes excitation of proprioceptive nerves from the plantar or volar muscles (on the sole or upper side of the foot). Although the positive supporting action seems necessary for the adoption of stance, it is probable that stance is maintained with very little effort in the muscles except when an unusual stance is adopted. Even then the body adopts a position in which the centre of gravity is above the centre of ground contact. Thus wearing high-heeled shoes which tilt the plane of the feet upwards from toe to heel causes the shoulders to be held back to counteract the forward thrust of the pelvis induced by the leg position (Fig. 14.2). Animal experiments demonstrate that a truly normal stance cannot be established or maintained unless the cortex and basal ganglia are intact. Spinal pathways are insufficient of themselves for standing. However, transection in the upper part of the pons results in decerebrate rigidity which can permit standing. Stance with normal muscle tone requires at least the forepart of the midbrain, and the positive and negative supporting reactions need the basal ganglia and the cortex to be intact.
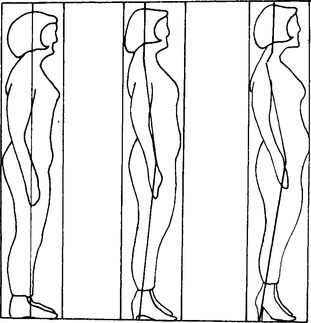
Figure 14.2 Posture – the balancing of body structures in the upright standing position at rest. A vertical line through the centre of gravity is drawn on the first figure. As the line through the legs moves away from the vertical because of the increased tilt as the heels become higher, the body position is adjusted to bring the centre of gravity back over the feet. The sections of the original line through legs, trunk, neck and head, are shown in their original positions as the posture is adjusted. The effect is exaggerated in the horizontal direction to show it more clearly.
Stay updated, free dental videos. Join our Telegram channel
VIDEdental - Online dental courses


