Introduction
Although much imaging research has focused on the localization and the management of impacted canines, optimal biomechanics for successful recovery are not clear. The purpose of this research was to compare the 3 mechanics—Kilroy spring, elastic chain, and steel ligature wire—used for the management of impacted canines by quantifying the 6 components of force systems involved with each system.
Methods
A dentoform model was modified to simulate a palatally impacted canine. Load cells installed in the dentoform simultaneously measured the 3 forces (Fx, Fy, Fz) and the 3 moments (Tx, Ty, Tz) on the canine. The activation range and force system attenuation as the canine moved were also measured. The results were analyzed statistically.
Results
The Kilroy spring has an activation range of 13 mm (Fz), the elastic chain has an activation range of 12 mm (Fz), and the ligature wire has an activation range of 1 mm (Fz). The full range of the elastic chain cannot be used because of its limited elastic behavior.
Conclusions
The 3-dimensional force system for canine recovery mechanics can be quantified by using these devices. Quantification of the force system provides critical information for appropriate selection of an optimal appliance.
The frequency of unerupted maxillary canines is approximately 0.8% to 2% in the general population, with ethnic variations. This tooth is the second most commonly impacted tooth after the third molar. The incidence of canine impaction is twice as common in female than in male patients. A canine is palatally impacted in 85% of these patients and labially or bucally impacted in 15%. Thus, treatment for palatally impacted canines is in high demand. Maxillary canines are important both esthetically and functionally. Patients with impacted maxillary canines are perceived to be more difficult and time-consuming to treat than those with a routine malocclusion. Location of the impacted canine and the treatment mechanics are important factors affecting the total treatment time and the final position of the canine in the oral cavity. With new technology, such as cone-beam computed tomography, the impacted canine can be precisely located in 3 dimensions. An optimal force system is then needed for the treatment, which is defined as the system that results in a greater biologic response with minimal tissue damage, resulting in rapid tooth movement with little or no deleterious effects. Continuous and constant forces are differential considerations for choosing an optimal orthodontic force system (during tooth movement). Traditional force systems are attenuated due to deactivation during tooth movement or as a result of the physical properties of the force delivery system. Burstone and Tanne stated that an ideal spring throughout its entire range of deactivation should produce a constant force.
Appliance design has been focused on improving force delivery. Although an ideal spring that can deliver such a continuous force day after day is only a theoretical possibility, various interarch and intra-arch mechanics have been devised for the successful management of impacted canines. Oppenhuizen and Jacoby devised an extrusion spring for palatally impacted canines using prefabricated 0.018-in stainless steel archwires. Bowman and Carano devised new directional force springs called “Kilroy I and Kilroy II,” used for palatally and buccally impacted canines, respectively. Sivakumar et al applied orthodontic traction using the elastic force from the eyelets and the traction hooks bonded to the enamel surface. Haydar et al used microscrews with either an elastic traction or a ligature wire for management of the impacted tooth. Vardimon et al recommended the use of magnets to treat impacted canines on the basis of a less invasive surgical procedure, effective forces at short distances, and controlled spatial guidance. Zasciurinskiene et al stated that the periodontal conditions of the impacted canine after surgical-orthodontic treatment depend on the initial vertical and horizontal positions of the impacted canine. However, none of these force systems or appliances has been adequately quantified clinically; this directly affects their design validation and selection of the products. Quantification is important because the canine moves in response to the orthodontic force system. Using an appliance with knowledge of the force system is an important step toward evidence-based treatment, which is essential for achieving more effective treatment.
The main objectives of this study were to (1) delineate the 3-dimensional (3D) force system for effective management of palatally impacted canines, (2) quantify changes in the mechanics as the tooth erupts, and (3) compare the force systems.
Material and methods
Three-dimensional tooth movement is frequently described by using a rectangular coordinate system (x, y, z system) with 6 degrees of freedom (3 translational and 3 rotational). A clinical coordinate system was set on the canine bracket. The origin was at the center of the bracket with its axes parallel to the buccolingual (B-L), mesiodistal (M-D), and occlusogingival (O-G) directions. The x-axis was directed mesially, the y-axis buccally, and the z-axis occlusally. Both force systems and tooth displacements were 3D entities ( Fig 1 ). They were both expressed in the coordinate system.
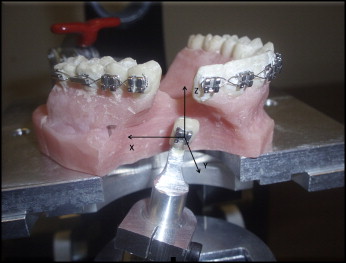
A measuring device based on a microscope frame was designed and built to measure the force and the moment acting on the canine in all 3 directions (x, y, and z). It consisted of a gamma load cell (ATI Industrial Automation, Apex, NC) attached to the frame and an x-y-z adjustment mechanism (microscope stage) for securing the dentoform and simulating the canine movement ( Fig 1 ). The load cell could simultaneously measure, with minute deflections, the force (0-65 ± 0.2 N) and the moment (0-5 ± 0.0009 N-m) with sufficient accuracy.
A clinical canine impaction (palatal) case was replicated on the maxillary arch of a dentoform. The dentoform was modified so that the force system on the canine could be measured. The teeth were bonded with 0.018 × 0.025-in preadjusted twin Andrews formula brackets (Oscar, Indianapolis, Ind). A 0.17 × 0.25-in stainless steel wire was used as the base archwire in all experiments. To enable a passive B-L fit of the archwire into the brackets, composite offsets were built onto the buccal surfaces of the teeth as needed. Elastomeric ties were used to hold the wires in the brackets. The dentoform was fixed on the stage. The maxillary left canine was separated from the cast and attached to the load cell through an adapter. The relative position of the canine with respect to the rest of the cast could be adjusted by the stage to simulate tooth eruption.
The instrument was calibrated to measure the moment and force values at the bracket. These readings were displayed simultaneously by a computer through an industry standard architecture bus interface.
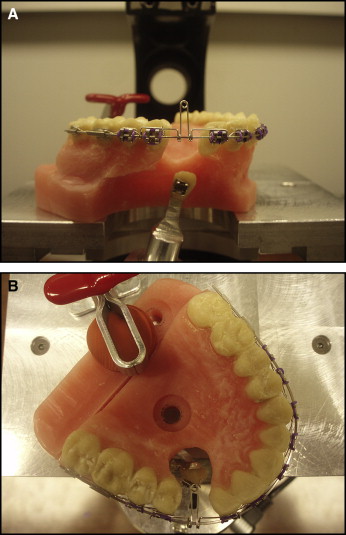
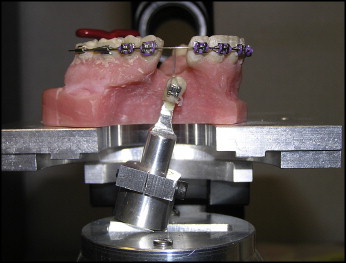
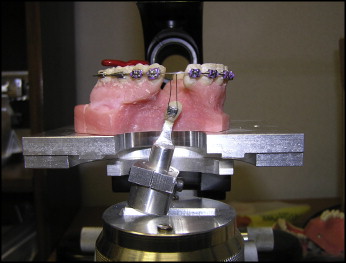
The force systems of 3 types of commonly used appliances—Kilroy spring, Echain, and ligature wire (all from American Orthodontics, Sheboygan, Wis), were tested as a function of tooth eruption. For statistical purpose, 10 pieces of each of the Kilroy spring (KS) ( Fig 2 ), the Echain (EC) ( Fig 3 ), and the ligature wire (LW), 0.09 mm in dimension ( Fig 4 ), were used. The instrument was zeroed before engaging the appliance. Three-dimensional force measurements were taken immediately after appliance activation and each increment of tooth eruption. The effect of material properties on the force system was also measured. EC is made of elastomeric that is viscoelastic. The effect of the material property needs to be investigated because there will be force relaxation for viscoelastic materials. Clinically, EC remains activated for a long time during treatment, and great force attenuation can occur. Measurements were taken initially and at different times. The force relaxation was quantified.
Statistical analysis
Individual statistical analyses were performed for forces Fx, Fy, and Fz and moments Tx, Ty, and Tz. The 5 measurements made on each specimen at each load were averaged for the analyses. The 3 spring types were compared for differences in load required for Fz to be approximately 0 by using log rank tests (using the load required to get Fz to approximately 0 in place of “time” in the survival analysis framework). Repeated-measures analysis of variance (ANOVA) was used to compare the spring types for differences in Fx, Fy, Fz, Tx, Ty, and Tz at each load. The ANOVA included terms for spring type, load, and spring-by-load interaction as well as a random effect to correlate measurements from the same specimen. A similar repeated-measures ANOVA was used to compare the slopes when treating load as a continuous variable. Although the relationships between load and the outcomes are not always linear, this analysis provided an indication of whether the outcomes change at similar rates as the load increases.
Results
The force (Fx, Fy, and Fz) and moment (Tx, Ty, and Tz) components for all 3 groups were obtained as a function of canine eruption. The Fz (O-G force component) is the dominant component for extruding the tooth. Fx (M-D force component) and Fy (B-L force component) move the tooth mesiodistally or buccolingually. Tx and Ty tip the tooth, and Tz rotates the tooth along the corresponding directions.
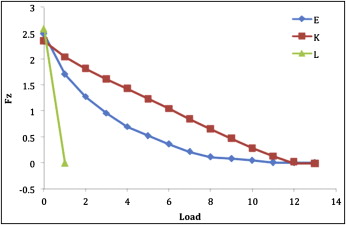
The force magnitude, the rate of force attenuation, and the force ranges were measured for vertical eruption of an impacted canine (Fz). Force in the O-G direction was the primary component of the total force involved in the eruption of the impacted canine. Initially (at full activation), Fz values were about 2.49 ± 0.06 N for EC, 2.58 ± 0.21 N for LW, and 2.35 ± 0.21 N for KS. Subsequently, Fz decreased for all 3 groups as the canine moved toward the occlusal plane. The rate of decrease was more significant for LW (0.00 ± 0.00 N) and EC (1.71 ± 0.08 N) when compared with KS (2.04 ± 0.27 N; P <0.001) ( Fig 5 and Table I ). KS and EC have an activation range of 13 mm (Fz), and LW has an activation range of only 1 mm (Fz). The force in KS and LW decreases linearly as the tooth erupts, and the Fz in EC decreases nonlinearly. For EC, there was a sharp fall of the force with the initial tooth eruption, and the rate of the fall decreased as the tooth erupted further. The force system changed also as a function of time when an eruption is fixed. This effect is more on EC than on KS and LW. The rate is reduced as time elapses ( Fig 5 ).
| Fx | Fy | Fz | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Load | EK | EL | KL | EK | EL | KL | EK | EL | KL |
| 0 | 0.0001 | 0.0215 | 0.0654 | 0.0001 | 0.0052 | 0.0001 | 0.0933 | 0.2349 | 0.0044 |
| 1 | 0.0001 | 0.3978 | 0.0001 | 0.0001 | 0.0001 | 0.3405 | 0.0001 | 0.0001 | 0.0001 |
| 2 | 0.0001 | 0.0001 | 0.0001 | ||||||
| 3 | 0.0001 | 0.0001 | 0.0001 | ||||||
| 4 | 0.0001 | 0.0001 | 0.0001 | ||||||
| 5 | 0.0001 | 0.0001 | 0.0001 | ||||||
| 6 | 0.0002 | 0.0001 | 0.0001 | ||||||
| 7 | 0.0038 | 0.0013 | 0.0001 | ||||||
| 8 | 0.0255 | 0.1937 | 0.0001 | ||||||
| 9 | 0.1437 | 0.7916 | 0.0001 | ||||||
| 10 | 0.5053 | 0.2751 | 0.0039 | ||||||
| 11 | 0.8095 | 0.1489 | 0.1653 | ||||||
| 12 | 0.9266 | 0.3243 | 0.9568 | ||||||
| 13 | 0.9105 | 0.3294 | 0.9657 | ||||||
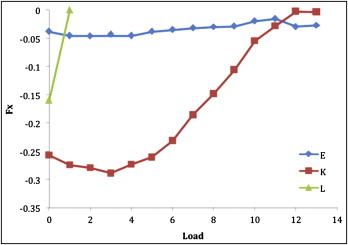
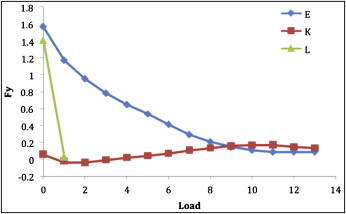
Relatively little attention has been focused on the forces in the M-D (Fx) and B-L (Fy) directions in the literature during eruption of an impacted canine. Fx was in the distal direction for all 3 appliances. It was –0.26 ± 0.15 N for KS, –0.04 ± 0.28 N for EC, and –0.16 ± 0.01 N for LW. KS had a significantly greater distal force on the canine in comparison with EC and LW. This force diminished as the tooth erupted. Both LW and KS had a significantly steeper Fx slope than did EC ( P = 0.0001 and P = 0.005) ( Fig 6 ). For all 3 groups, Fy was positive and produced a bucally directed force on the palatally impacted canine. It was 0.06 ± 0.14 N for KS, 1.57 ± 0.04 N for EC, and 1.41 ± 0.10 N for LW. The component changed as the tooth erupted. There was a gradual increase in the buccal component of the total force for the KS, whereas in the case of EC and LW buccal force was high to begin with and then decreased on each activation ( Fig 7 ).
For the moment in the M-D direction (Ty), EC had a pronounced mesial crown tip during eruption, displaying a steeper slope than KS, which had a distal crown tip to begin with, and it remained unchanged throughout the entire path of eruption. However, the moments were not large; therefore, the resultant slope was flat. EC had a significantly different Ty slope than did LW ( P = 0.0086) and KS ( P = 0.0001) ( Table II and Fig 8 ).


