12 Sonic and Ultrasonic Treatment
The term “sonic” refers to sound waves in the region of 16 Hz up to 20 kHz, whereas ultrasonic waves range from 20 kHz to 1 GHz. Over 50 years ago, Richman (1957) first described the use of ultrasonic technology in endodontic treatment and root tip resection. Almost 20 years elapsed before the use of ultrasonic technology was again pursued (Martin, 1976). Thereafter, numerous scientific publications appeared (literature reviews: Hülsmann, 2000; Haapasalo et al., 2005) indicating the possibilities and potential significance of sonic and ultrasonic devices in endodontology. These are based on three mechanisms of action:
• cavitation;
• production of heat;
• acoustic microstreaming.
Most of the research of the past 30 years has been targeted toward the use of sonic and ultrasonic devices as replacements for, or enhancement of, traditional, manual root canal instrumentation, and synergistic action with irrigating solutions. The past decade brought a total paradigm shift: Today, the primary areas of use include disengaging and loosening of intracanal obstructions, endodontic retreatment, and retrograde treatment approaches. The three mechanisms of action of ultrasonic devices have been evaluated time and again with varying results, but in principle they are generally recognized as being effective (van der Sluis, 2006).
An ultrasonic generator (usually piezoelectric) causes the files to oscillate with an undulating wave pattern with a series of nodes and antinodes along its length. The continuous waves help in the removal of dentin chips and debris; the action is strongest at the tip where the amplitude of the oscillations is the largest (Ahmad et al., 1992). Ultrasonic waves in the presence of liquids results in massive oscillation with regions of high and low pressure. This phenomenon is known as cavitation. The result includes bubble formation within the liquid, as well as turbulent fluid currents. The microbubbles created may be empty, or may contain gas or vapor. With the use of sodium hypochlorite, it is possible to achieve a warming effect above the boiling point of 40°C, which leads to the formation of the Na+ cation, the hypochlorite anion ClO, as well as the formation of NaOH, ClOH, C12, O, or NaCl (van der Sluis et al., 2006). These highly reactive elements may be the reason for the observation that the antibacterial effect of ultrasound in the presence of water is relatively weak (Ahmad et al., 1990), but is much stronger with typical endodontic irrigating solutions, providing a large antibacterial effect (Cameron, 1987; Huque et al., 1998).
With the application of high acoustic pressure, the microbubbles enlarge until they eventually implode, creating strong local pressure waves as well as a rise in temperature (heat). This physical principle is also exploited in devices such as the urolithotripter, which is used for the destruction of gallstones or kidney stones. In comparison, the instruments designed for use in the dental practice are too weak to create large cavitation effects. For this reason, the effect has been considered by numerous authors as too mild and thus ineffective (Ahmad et al., 1987b, 1988; Walmsley 1987; Lumley et al., 1988).
Most important and effective is the third mechanism of action: acoustic microstreaming. Within the sonic field, there is an interaction between the sonic file oscillations and the irrigating solution, which leads to motion within the fluid, the so-called “eddy current.” This current flows from the coronal end of the root canal toward the apical area and exhibits the typical nodes and antinodes; it is strongest at the tip (van der Sluis, 2006). Due to the higher level of energy, the eddy currents that are created elicit hydrodynamic shear stresses, which have been demonstrated in many studies (Ahmad et al., 1987a, b, 1992; Lumley et al., 1991; Walmsley et al., 1992, Roy et al., 1994). Contact of the sonic or ultrasonic probe with the internal surface of the root canal reduces acoustic microstreaming by interrupting the continuous motion of the wave, but does not eliminate it completely.
Sonic Systems
Sonic devices operate at 1500–6000 Hz. Included in this category, are, for example, Endostar (Syntex, USA), Megasonic 1400 (Mega-sonic, USA), and Sonic Air MM 1500 (MICRO-MEGA, France). Special instruments are required (e.g., heli-, rispi-, shaper-, or triosonic files), some of which resemble traditional rasps. The Shaper-Sonic files in particular permit rapid removal of dentin remnants and debris; this is due to the design of the instruments, but also because sonic devices are much better at removing hard substances than ultrasonic devices (Miserendino et al., 1988).
In general, files of smaller diameter are more effective. The higher amplitude of motion at the file tip is advantageous in comparison with ultrasonics, but is counteracted by the fact that the degree of dentin transport is more difficult to control and there is some loss of tactile sensitivity.
In addition, instrument fractures and complications such as step formation, loss of working length, etc., occur less frequently with sonic than with ultrasonic devices. There remains some controversy concerning effect on canal shaping and roughness due to the file design (Loushine et al., 1989). For these reasons, sonic systems have not been widely accepted for use in endodontic practice.
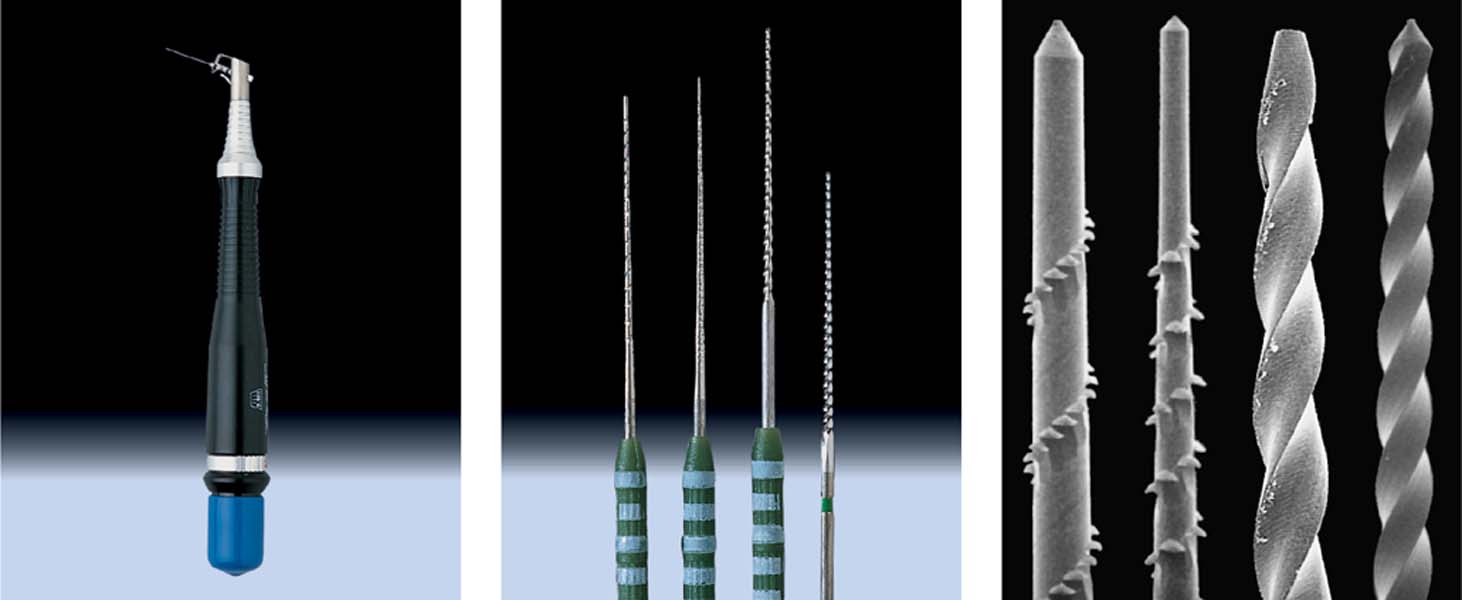
12.1 Sonic instrumentation
Low />
Stay updated, free dental videos. Join our Telegram channel
VIDEdental - Online dental courses


